Настольный РУД
симулятора двухмоторного самолёта с поршневыми двигателями
Текущие материалы:
1. Модель устройства в формате
STEP
2. Ардуино скетч
tq2pistonengines.zip
3. Фрагмент конфига для связи с xpiohub
[device]
port:5
[IND ELEV TRIM]
mode: datarefPoll
dataref: sim/flightmodel/controls/elv_trim
type: float
devadr: 15
pos: 0
len: 4
factor: 700
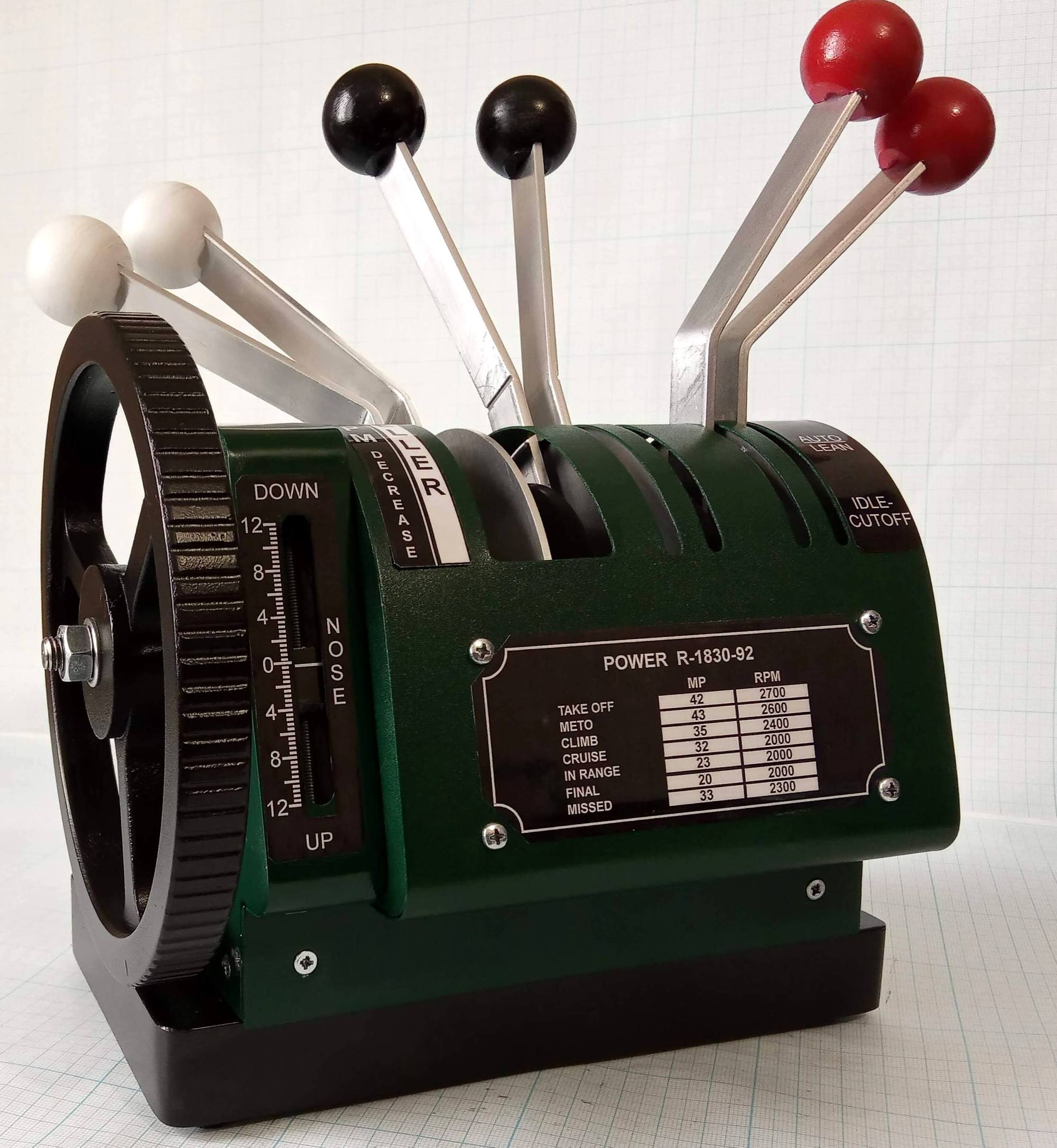
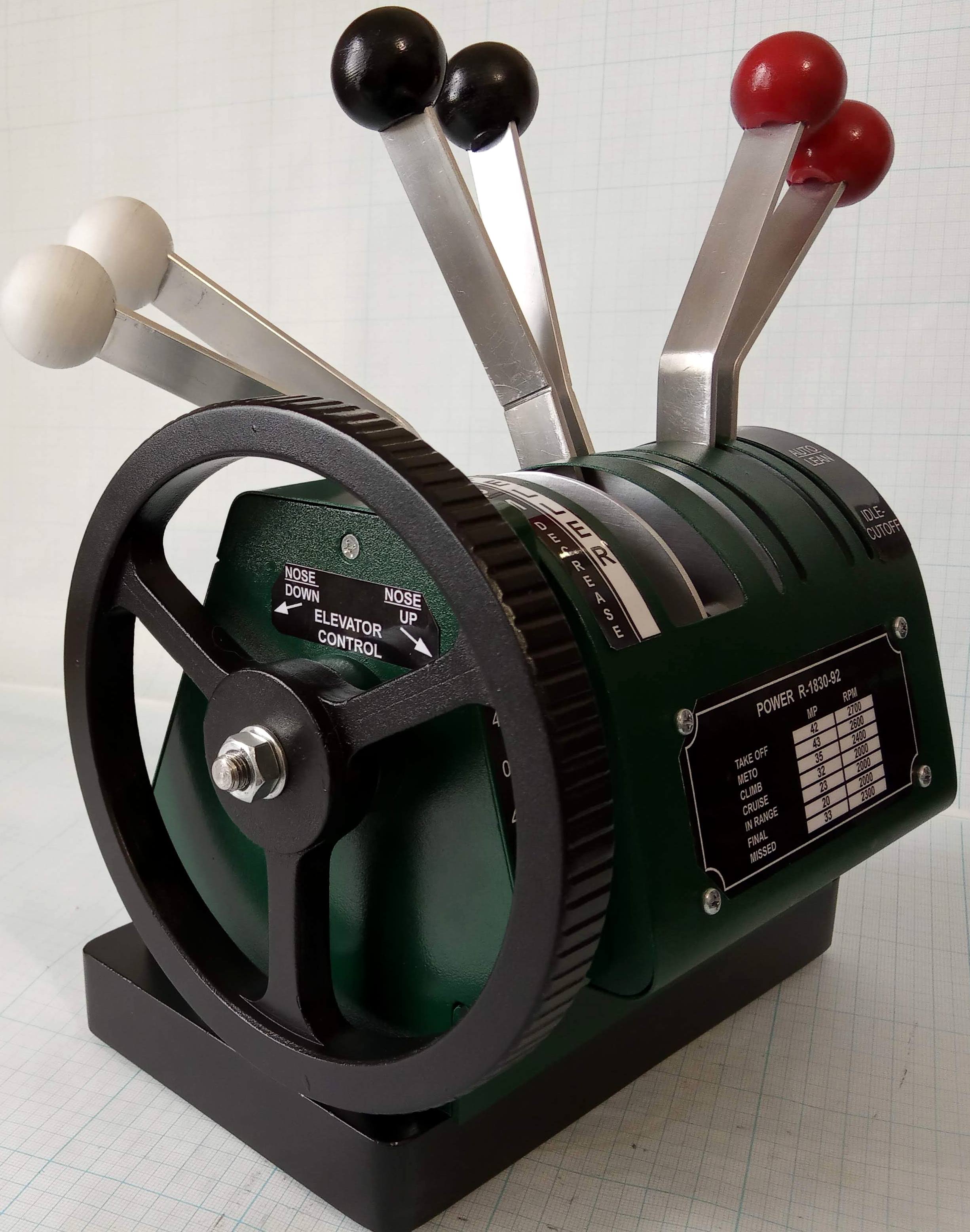
"Настольник" и снова Ардуино. Проект не новый, вполне себе долгострой, выкладываю как есть, с недоделками.
Впрочем, всё работает. Если сложится, буду обновлять по мере прогресса.
РУД обнаруживается в операционной системе как композитное устройство HID/CDC:
1. Джойстик с шестью осями и двумя кнопками. "Кнопки" эмулируют импульсные нажатия (up/down) при вращении колеса триммера.
2. Виртуальный коммуникационный порт клиента плагина xpiohub, используется для управления указателем положения триммера.
Указанную функциональность обеспечивает соответствующий скетч, загруженный в плату Arduino Leonardо.
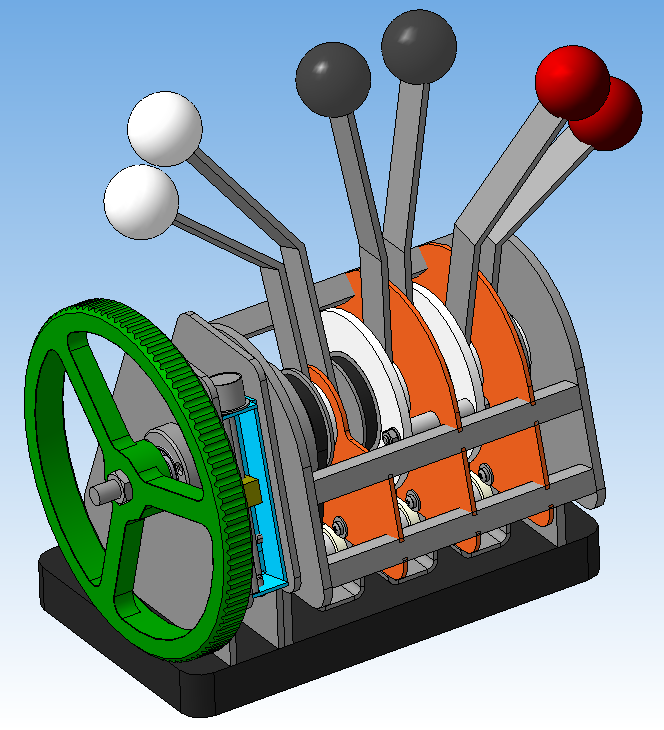
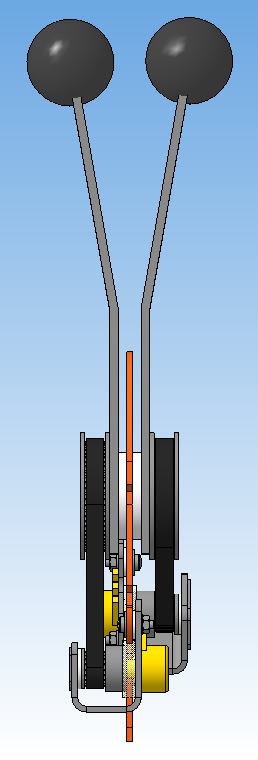
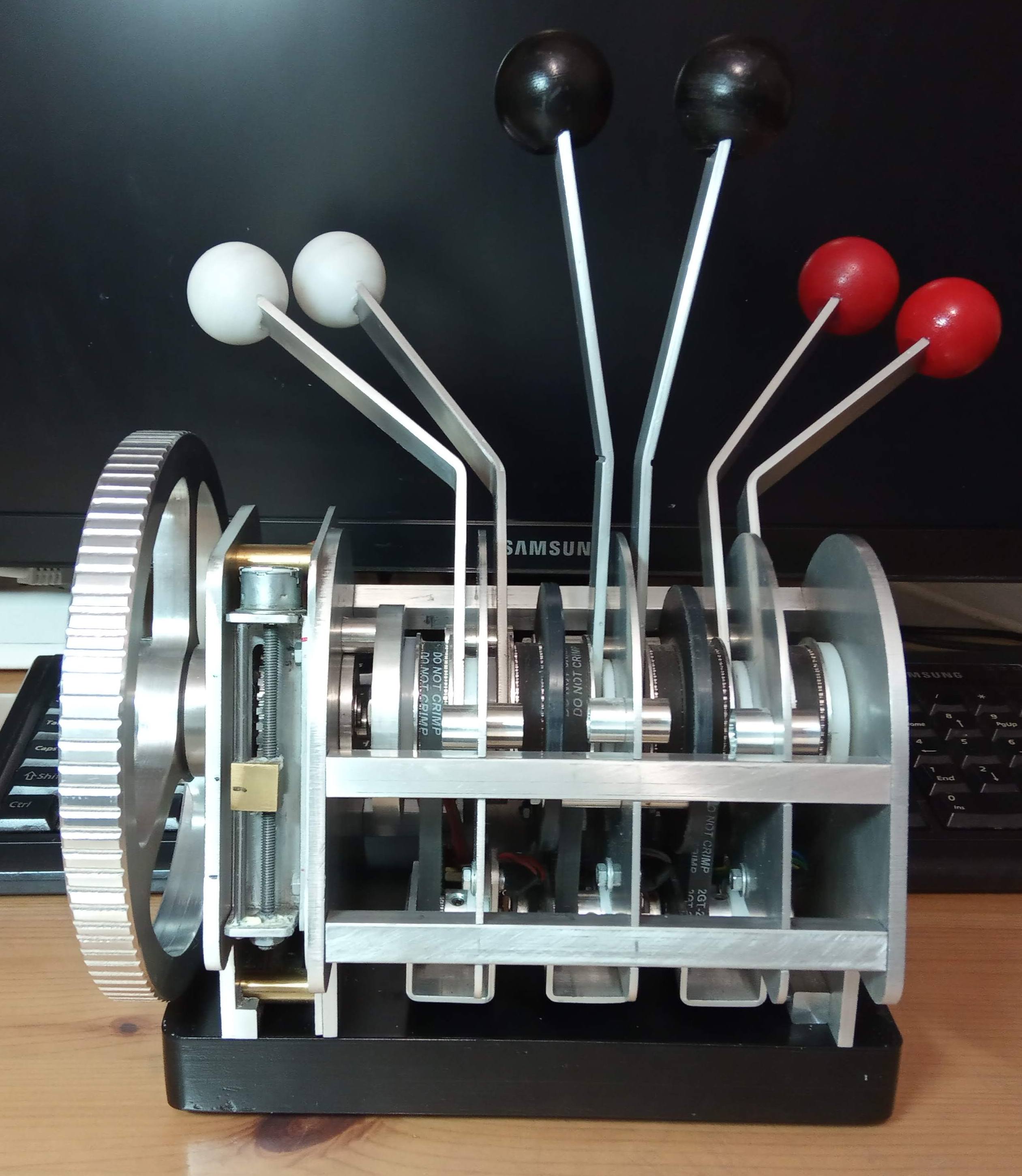
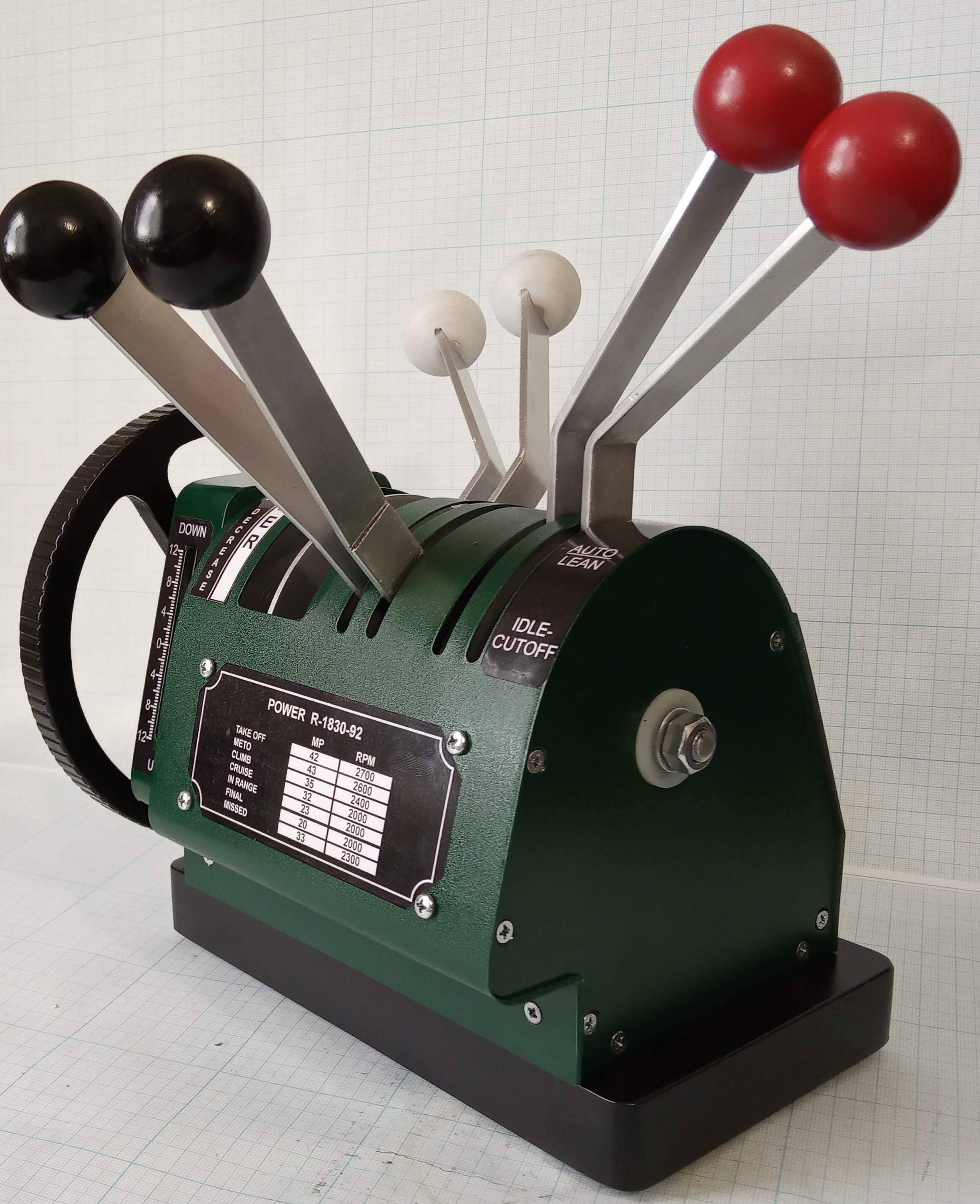
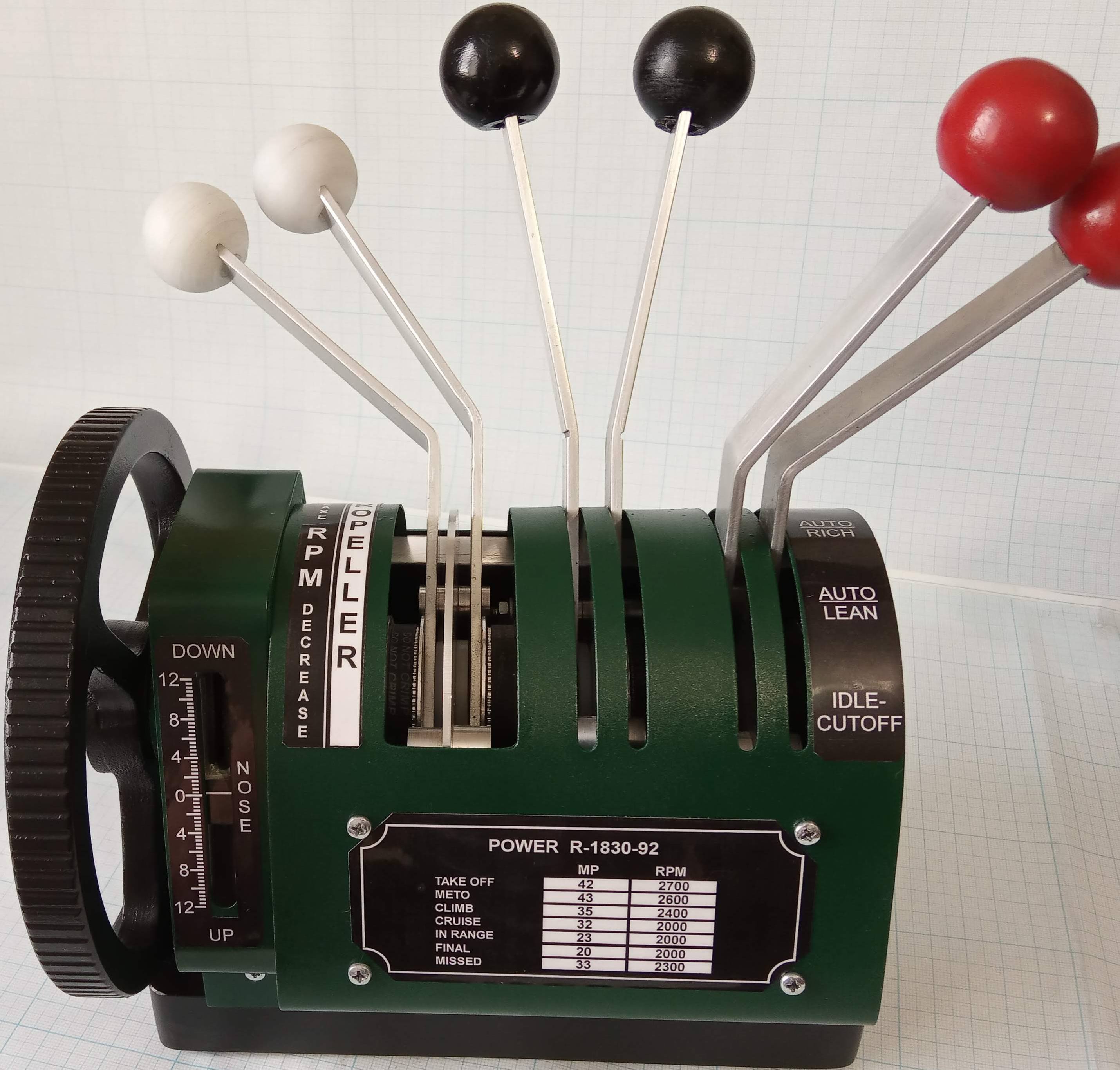
Конструкция модульная, можно выделить модули шага винта,
наддува, смеси и узла колеса триммера с указателем положения.
Через все модули рычагов проходит неподвижная шпилька.
Результирующий набор на шпильке состоит из чередующихся фрикционных пар.
Гайка на конце шпильки стягивает пакет и служит для регулировки загрузки.
Рычаги наддува (средние) дополнительно "экранированы" неподвижными шайбами.
 |
| Рис.1 |
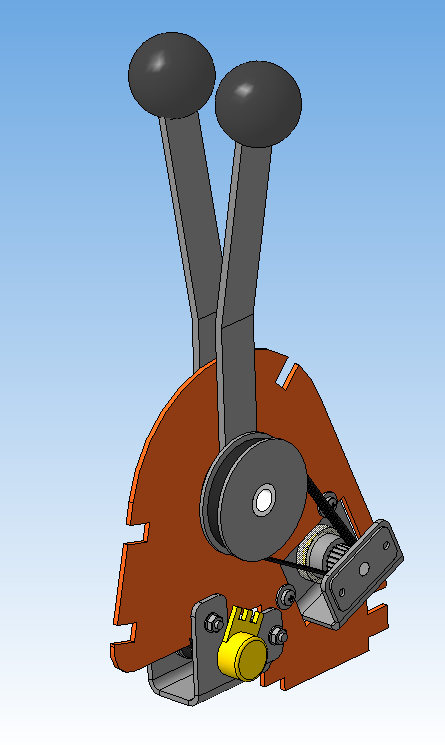
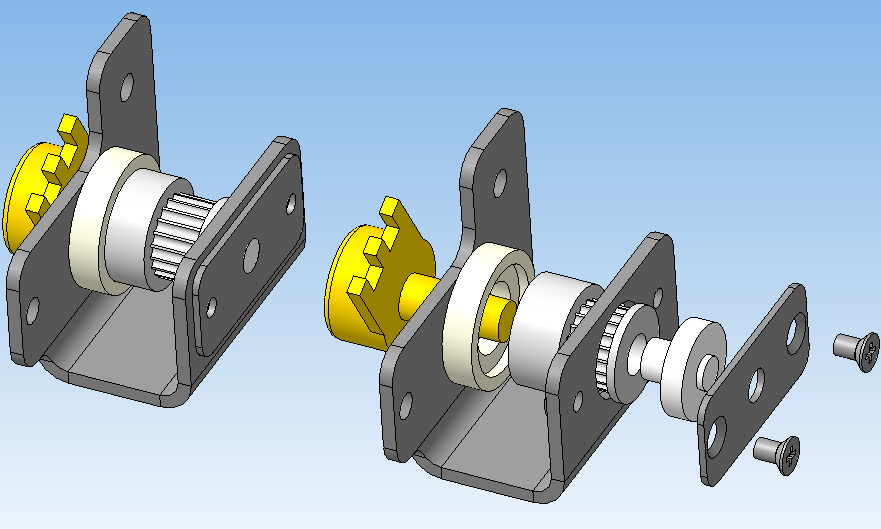
Каждый рычажный модуль состоит из двух рычагов и двух пар синхронных ременных передач 1:3, что позволяет при секторе рычагов
в 90 градусов иметь на валах резисторов рабочий сектор 270 градусов, то есть, всю шкалу.
Использование синхронной ременной передачи имеет компоновочные преимущества по сравнению с обычной зубчатой.
К тому же, минимизируется проблема люфта.
 |
| Рис.2 |
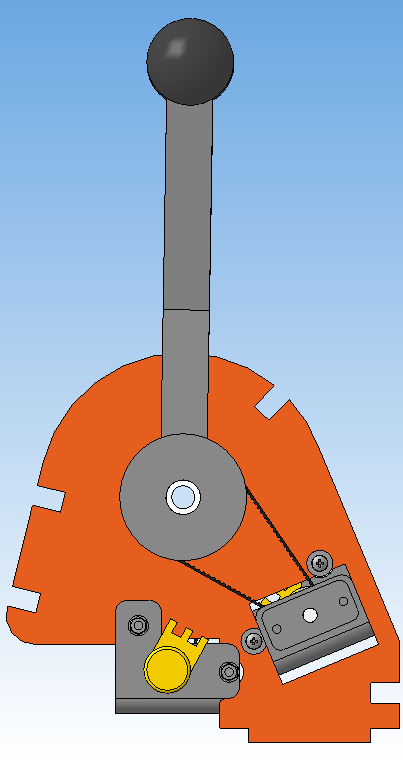
Внизу монтажной пластины имеется шип, который вставляется в соответствующий паз в основании.
Имеется четыре паза под стрингеры, которые никак не скрепляются с монтнажной пластиной, кроме как за счёт плотной посадки.
 |
 |
| Рис.3 |
Узел резистора.
Выполнен так, чтобы частично снять нагрузку с
вала резистора и служить задаче регулировки натяжения ремня за счёт
"плавающего" положения в окне монтажной пластины.
 |
| Рис.4 |
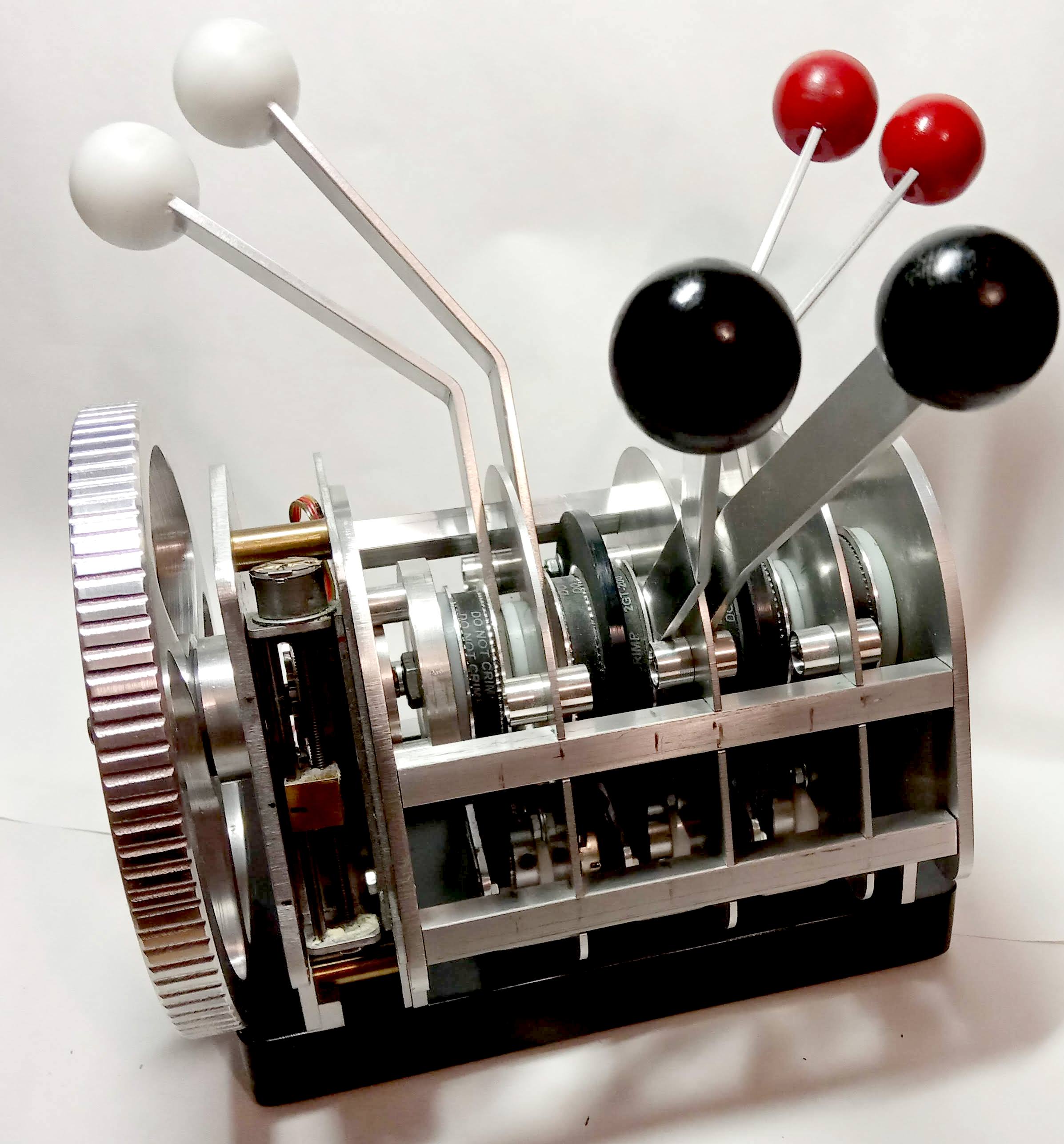
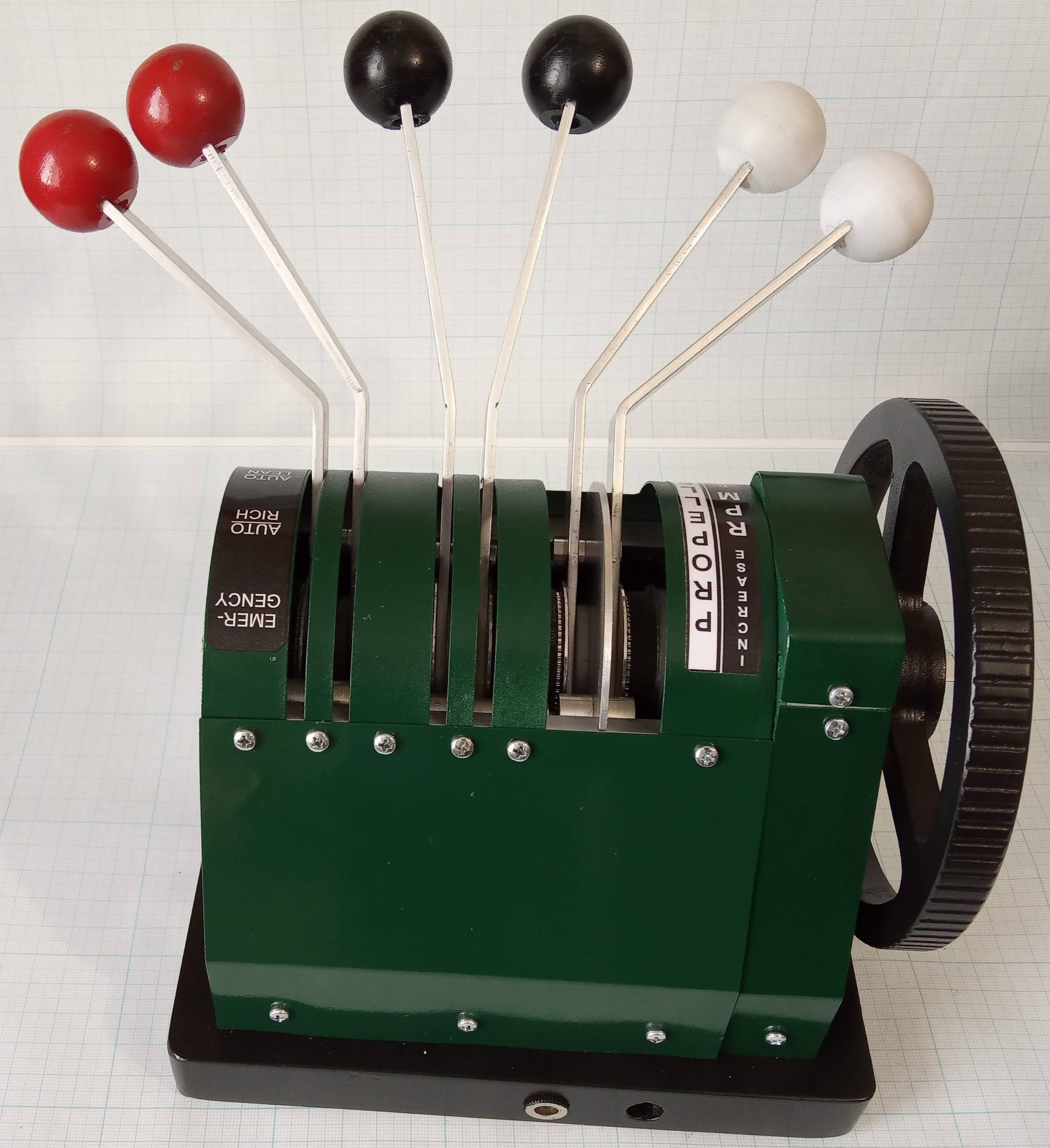
На фотографии видно, что сами стрингеры никак не закреплены. Планируется крепление в двух точках в районе торцев.
С монтажными пластинами модулей рычагов стрингеры не скрепляются.
 |
| Рис.5 |
Основание выполнено из "композита" Д16АТ 2мм + 2 х (фанера сосновая 10 мм).
 |
| Рис.6 |
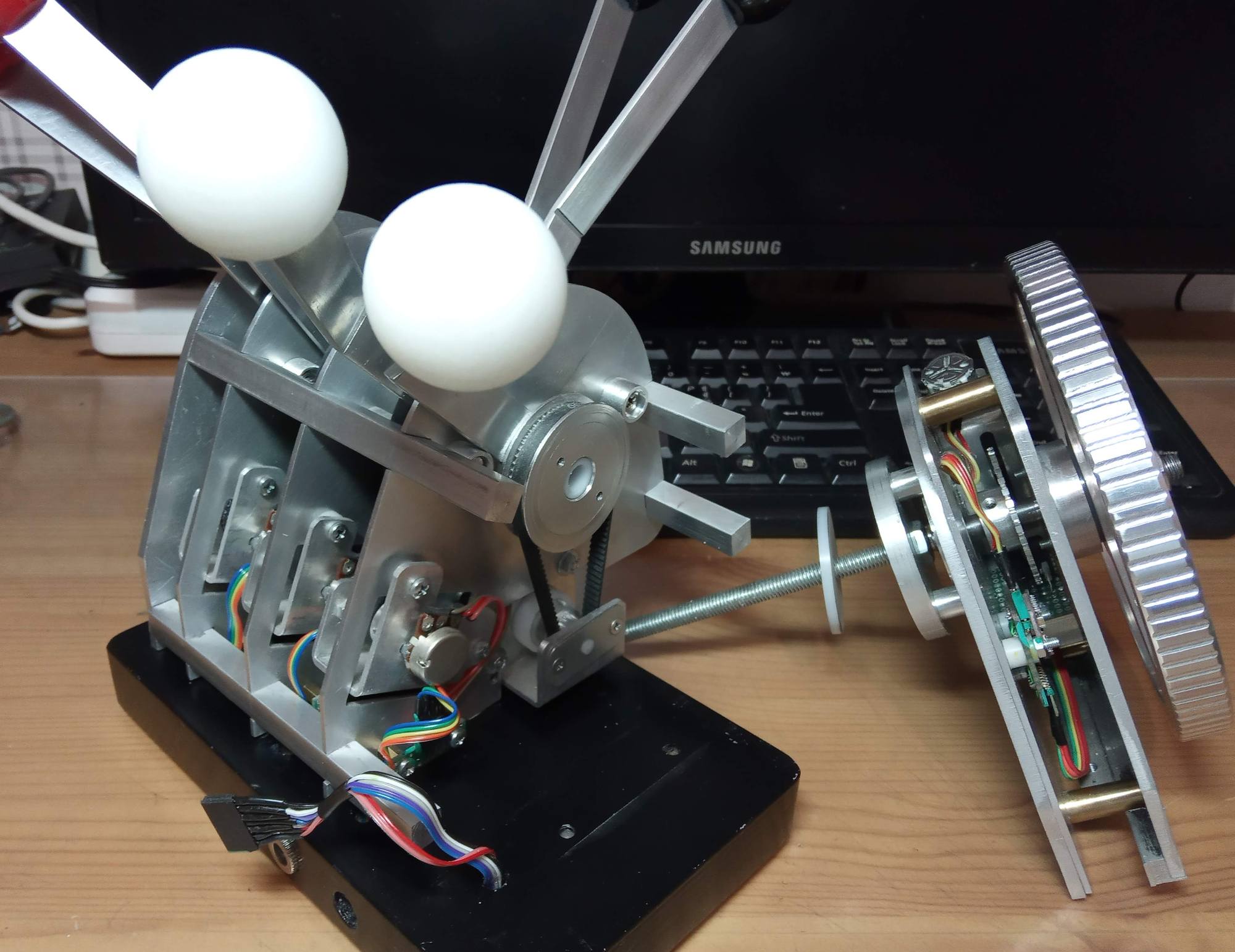
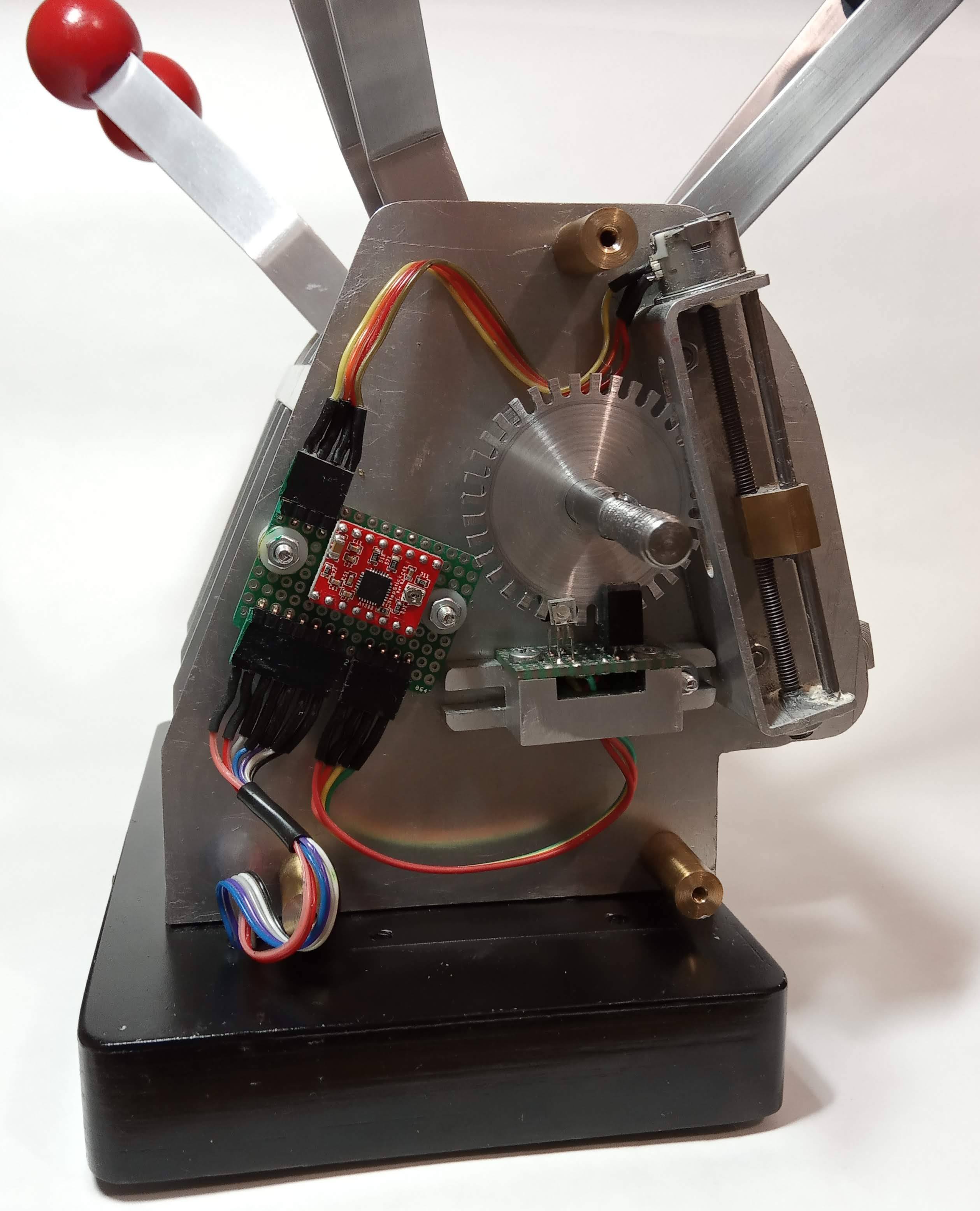
Вид на узел триммера.
Датчик колеса триммера преставляет собой квадратурный энкодер с двумя оптопарами с открытым оптическим каналом TCST1103.
По факту у одной был успешно выпален светодиод, после восстановления открытым стал не только оптический канал.
Шаговый двигатель узла указателя положения триммера от флоппи дисковода 3.5 дюйма.
 |
| Рис.7 |
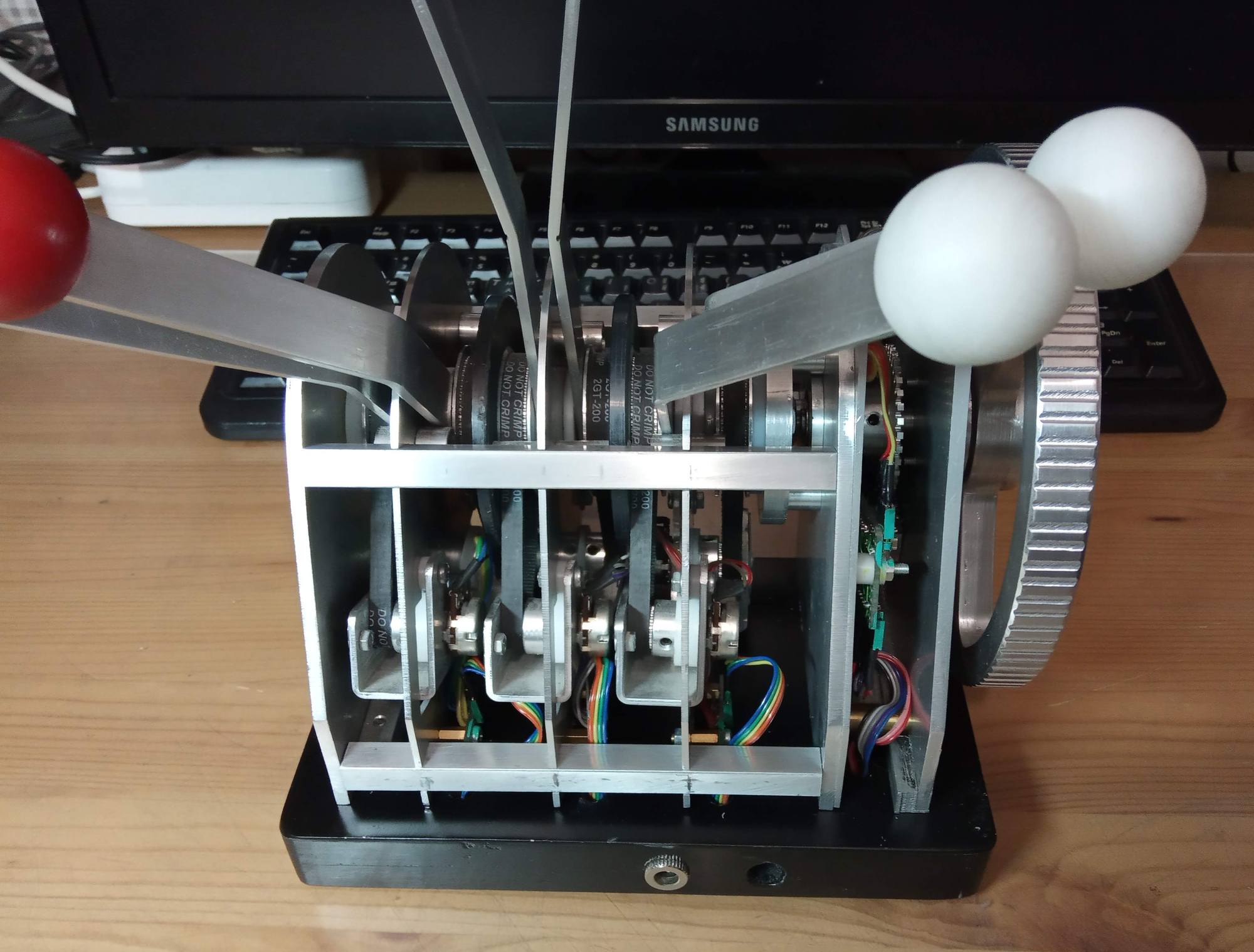
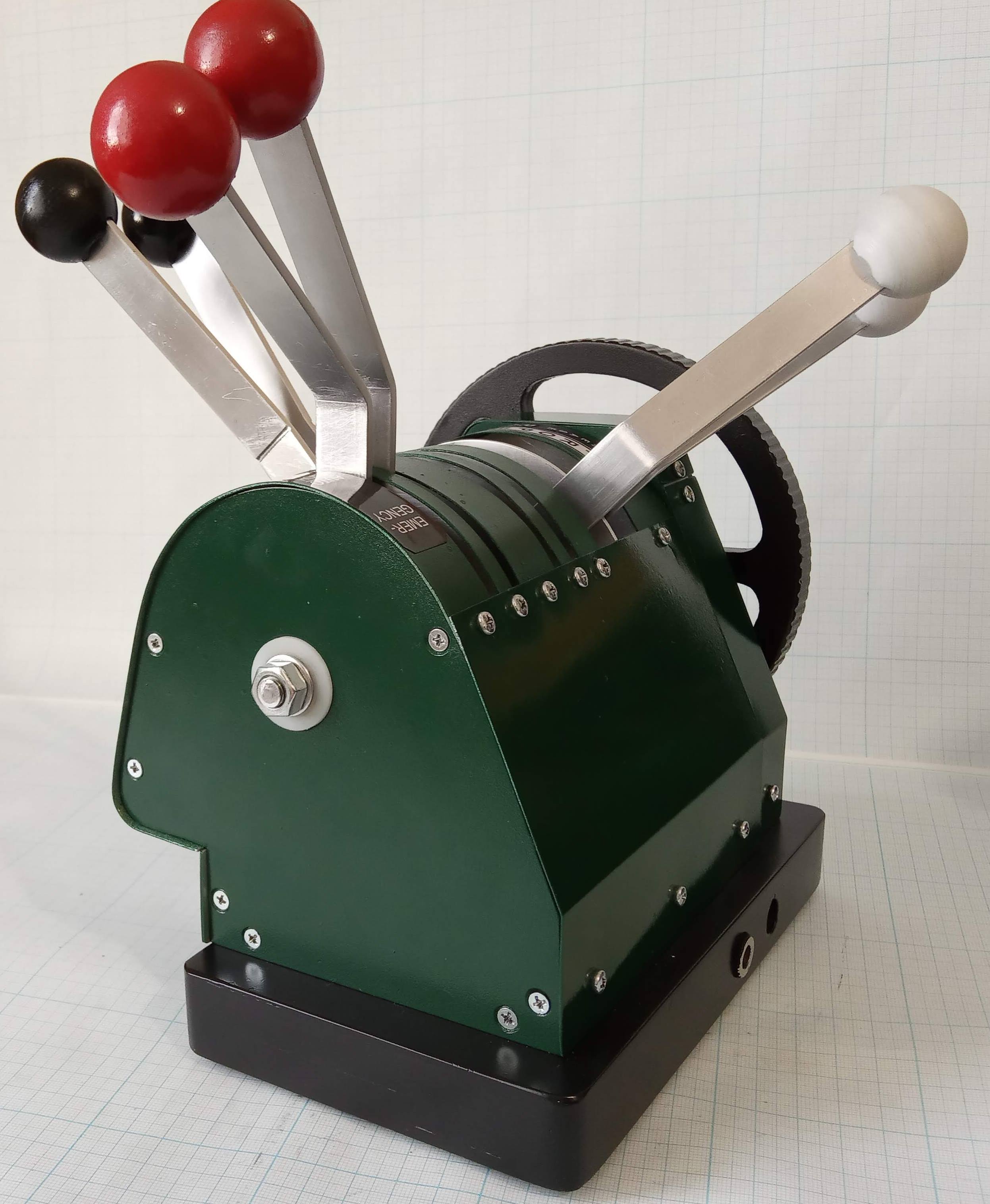
Неполная разборка автомата Калашникова на время... отставить!
На самом деле, на то, чтобы развалить конструкцию, уходит не более одной минуты. Ну, это пока
"стрингеры" никак не закреплены и не изготовлены крышки.
 |
| Рис.8 |
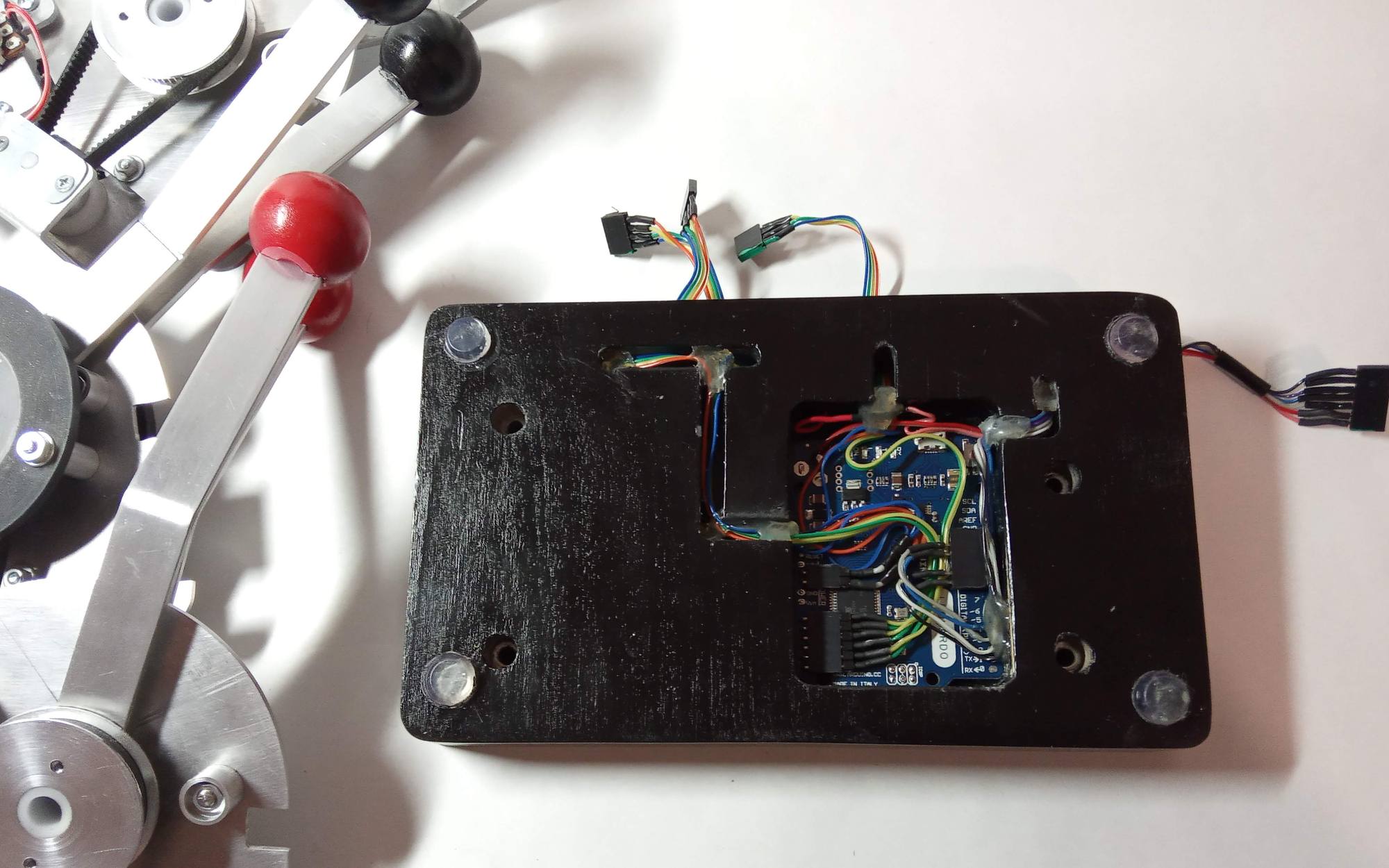
Ардуина пристроилась в подвале основания.
 |
| Рис.9 |
 |
| Рис.10 |
 |
| Рис.11 |
 |
| Рис.12 |
 |
| Рис.13 |
|
| Рис.14 |
 |
| Рис.15 |
 |
| Рис.16 |
 |
| Рис.17 |
 |
| Рис.18 |
 |
| Рис.19 |
|